Eigentlich sollte die Überschrift heißen: Ärgere ich mich gerade über mich selbst oder über AVM?
Zuhause arbeitete eine FRITZ!Box 7590 KA, die zu Beginn mit einem Frixtender erweitert wurde. Nach knapp zwei Jahren habe ich bemerkt, dass die FRITZ!Box angefangen hat zu fiepen. Eine Funktionseinschränkung konnte ich jedoch nicht feststellen. Da es aber knapp vor dem Ablauf der Garantie war, habe ich Kontakt mit dem AVM-Support aufgenommen.
Dem AVM-Support habe ich in einer kurzen E-Mail geschildert, dass meine Box plötzlich fiept und ob ihnen in diesem Zusammenhang vielleicht Probleme, beispielsweise mit Spulen oder Spannungsreglern, bekannt sind. Die Antwort vom AVM-Support ließ nicht lange auf sich warten und lautete zusammengefasst: „Nein, uns sind keine Probleme bekannt, aber du kannst deine Box gerne zur Überprüfung/Austausch einschicken.“
Jetzt kommen wir zum Punkt, warum ich mich ärgere und unschlüssig bin, ob ich mich über mich selbst oder über AVM ärgere. Für meine Arbeit benötige ich eine funktionsfähige Internetverbindung. Wenn ich die Box einschicke, muss ich für eine Alternative sorgen. Wenn AVM die Box vorsorglich gegen eine neue tauscht, wäre das zwar schön, aber es gibt schon zu viel Elektroschrott. Elektronik darf Geräusche machen. Spulen könnt ihr euch oft wie eine Art Schwungrad vorstellen. Es braucht etwas, um anzulaufen, läuft dann aber auch noch einige Zeit weiter, selbst wenn es niemand mehr antreibt. Das hängt mit den aufkommenden Magnetfeldern zusammen und ist so gewollt. Magneten kennt ihr, und dass dort Kräfte an den Bauteilen ziehen, könnt ihr euch jetzt ebenfalls vorstellen. Eine Spule kann also mit der Zeit anfangen, leichte Geräusche zu machen, und das ist auch okay. Für Spannungsregler gilt das ebenfalls. Stellt euch einfach euren Wasserhahn vor: Wenn ihr ihn voll aufdreht, kommen da vielleicht 5 Liter in der Minute heraus. Wenn ihr weniger Wasser wollt, macht ihr den Hahn ganz schnell an und wieder aus. Wie schnell ihr das Wasser ein- bzw. ausschalten müsst, um beispielsweise nur 1 Liter pro Minute fließen zu lassen, messt ihr mit euren Augen. Ganz grob funktionieren Schaltnetzteile so. Je nach Last kann man da also schon mal etwas hören, und das ist okay.
So ist ein weiteres Jahr ins Land gegangen, bis mir in einem meiner Newsticker die Meldung über sterbende FRITZ!Boxen vom Typ 7590 aufgefallen ist. Hier wird von anfänglichem Fiepen, schlechter werdendem 2,4-GHz-WLAN bis hin zum Totalausfall des WLANs und der Box berichtet. Bääähhhhh. Das klang verdächtig nach dem von mir beobachteten Fehlerbild. Nun ist meine Box aus jeglicher Garantie und Gewährleistung heraus. Den AVM-Support brauche ich also nicht mehr zu bemühen, sondern kann mich vielmehr mit dem Gedanken anfreunden, eine neue Box zu kaufen, um auf einen Ausfall vorbereitet zu sein. Zeitgleich haben bei uns im Ort die Arbeiten am Glasfaserausbau begonnen. Diese gehen so schnell und gut voran, dass ich damit rechnen kann, bis zum Ende dieses Jahres von DSL auf Glasfaser wechseln zu können. Mit diesem Wechsel kommt vom Anbieter auch eine neue FRITZ!Box. Tjo… Also Risiko eingehen oder eine Box kaufen, die in 5 oder 6 Monaten dann wohl irgendwo im Regal Staub fängt?
Bevor es eine Antwort auf diese Frage gibt, noch schnell zum Punkt mit dem Ärgern: Ich habe AVM bewusst gefragt, ob es bekannte Probleme mit der Box gibt und speziell auf die aus meiner Sicht verdächtigen Bauteile hingewiesen. Die Antwort war ein klares Nein. Das muss ich jetzt einfach so glauben, aber ich werde den Beigeschmack nicht los, dass es zum Zeitpunkt meiner Supportanfrage schon einige Reklamationen wegen dieses Problems gegeben haben müsste. Daher wohl mein möglicher Ärger über AVM – und dass ich auf die Möglichkeit eines Austauschs verzichtet habe – und der Ärger über mich selbst.
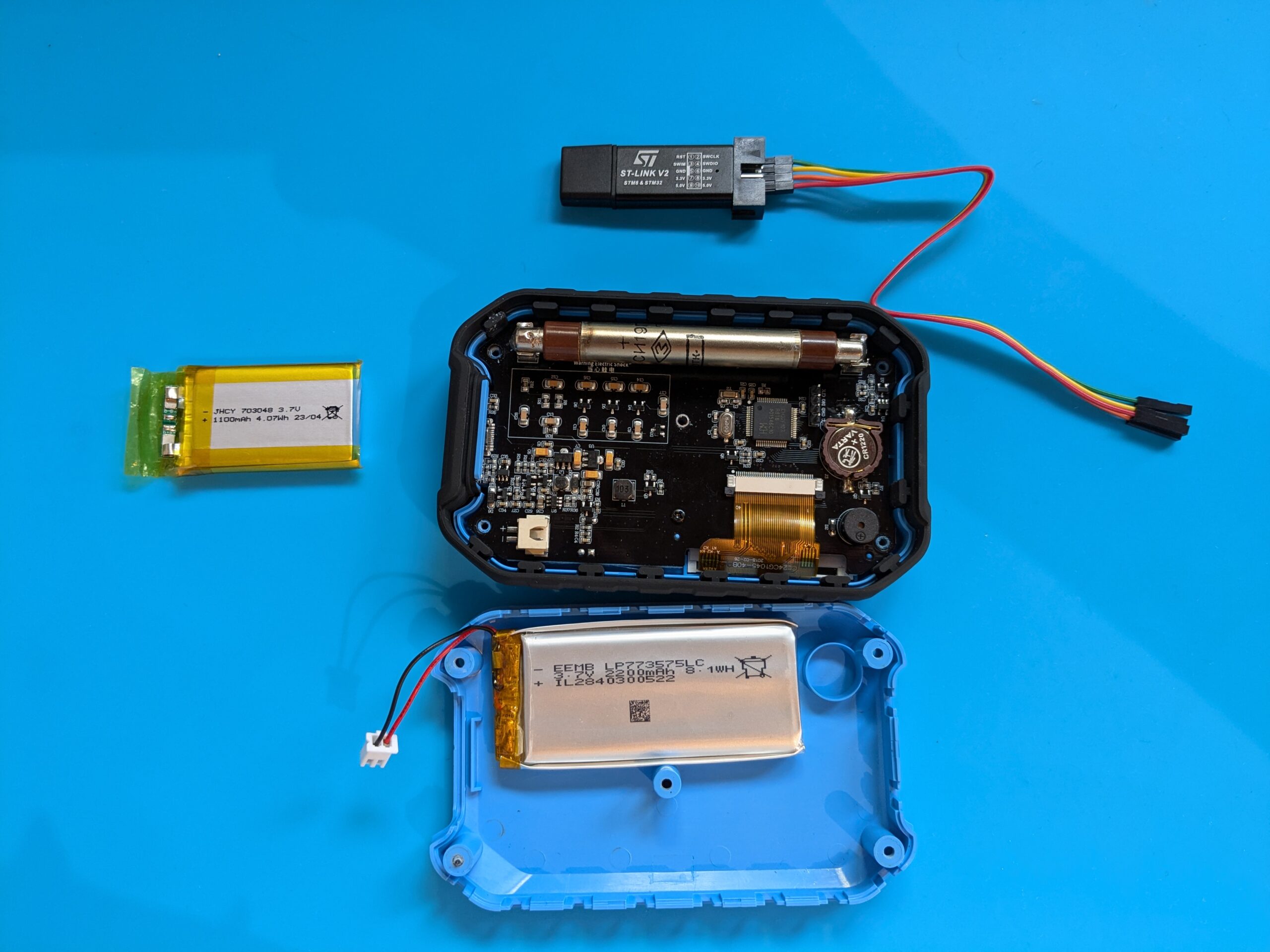
Habe ich jetzt eine neue Box gekauft oder nicht? Nein, habe ich natürlich nicht. Ich habe meine Box von der Wand genommen, aufgeschraubt und durchgemessen. Ja, Geräusche und etwas zu hohe Spannung für das 2,4-GHz-WLAN habe ich gemessen bzw. zuordnen können. Alles aber noch im Rahmen, sodass ich gehofft habe, dass es noch ein paar Monate gutgeht. War leider nicht so. Vor ein paar Wochen ist die Box an der Wand „geplatzt“ und ich musste in den sauren Apfel beißen und eine neue für den Übergang kaufen. Jetzt habe ich wohl ein Backup für die Zukunft. Woohoo 🙁 Manchmal lerne ich nicht so schnell dazu, oder? Naja, manchmal kommt halt eins zum anderen.
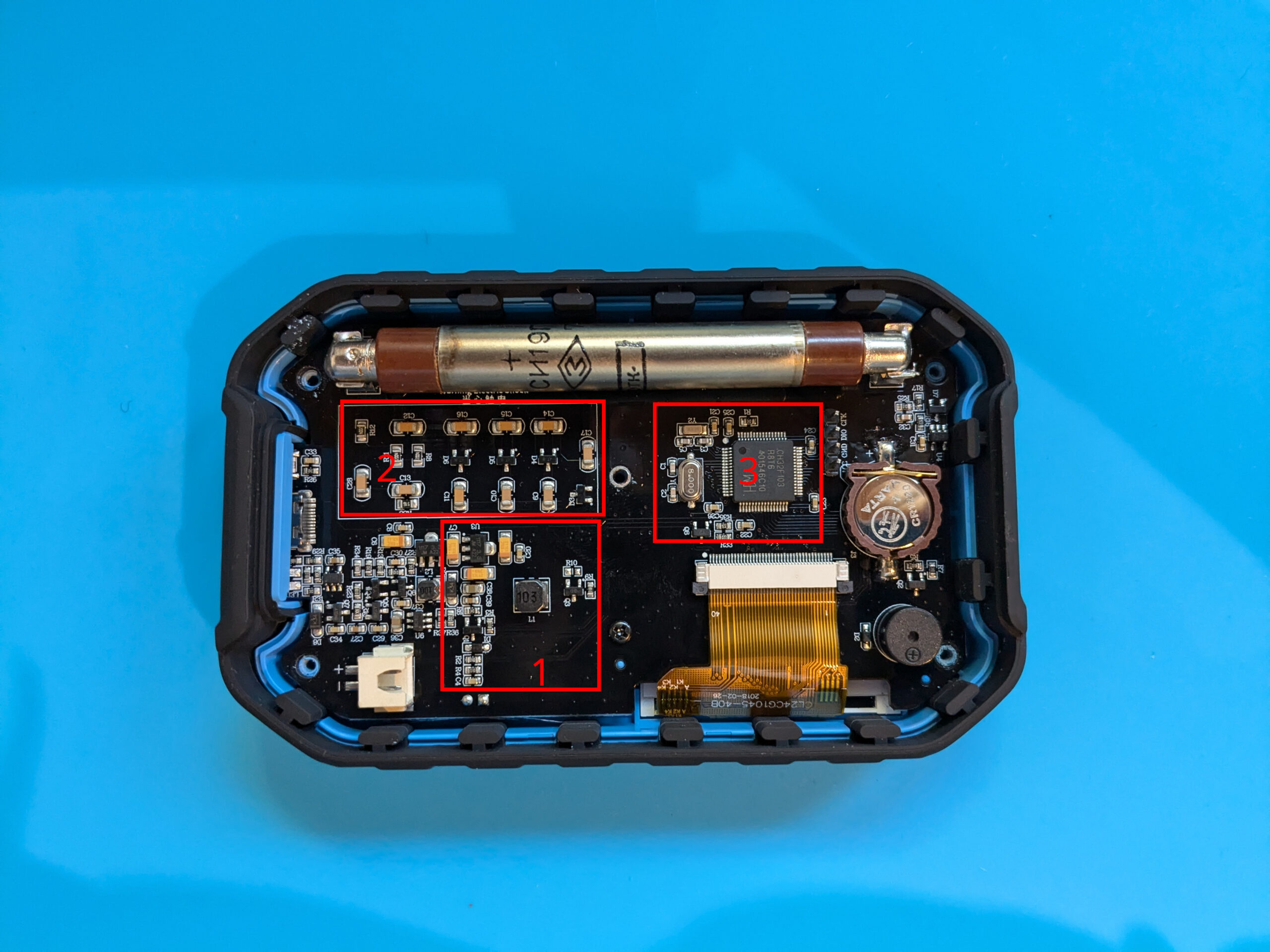
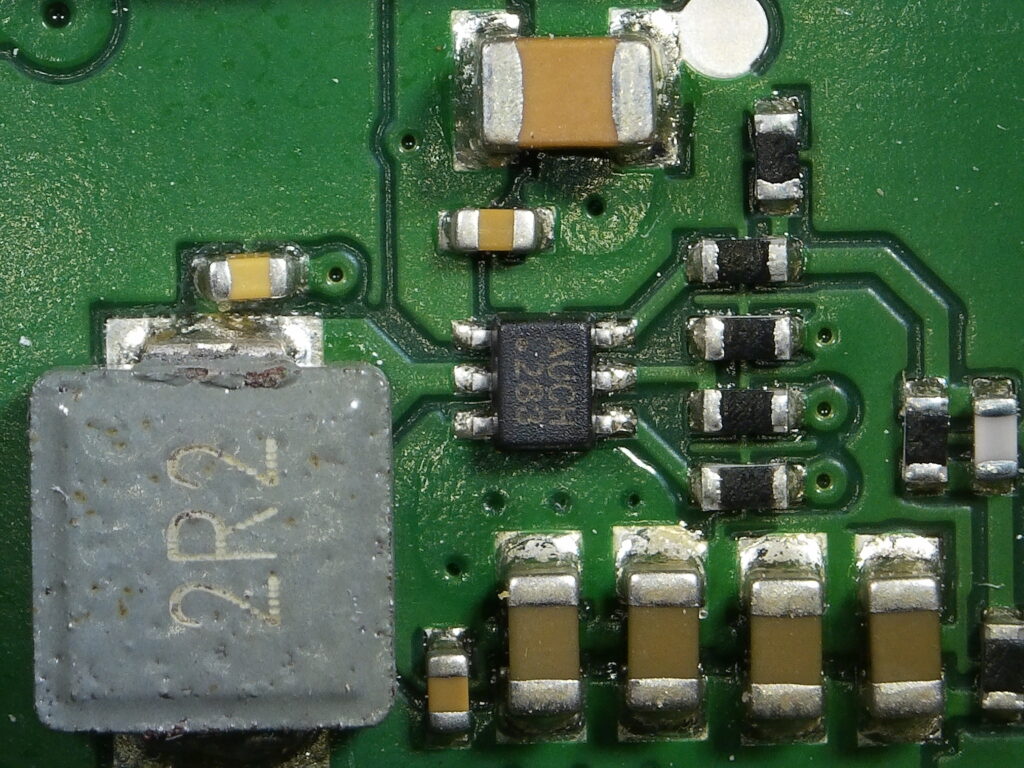
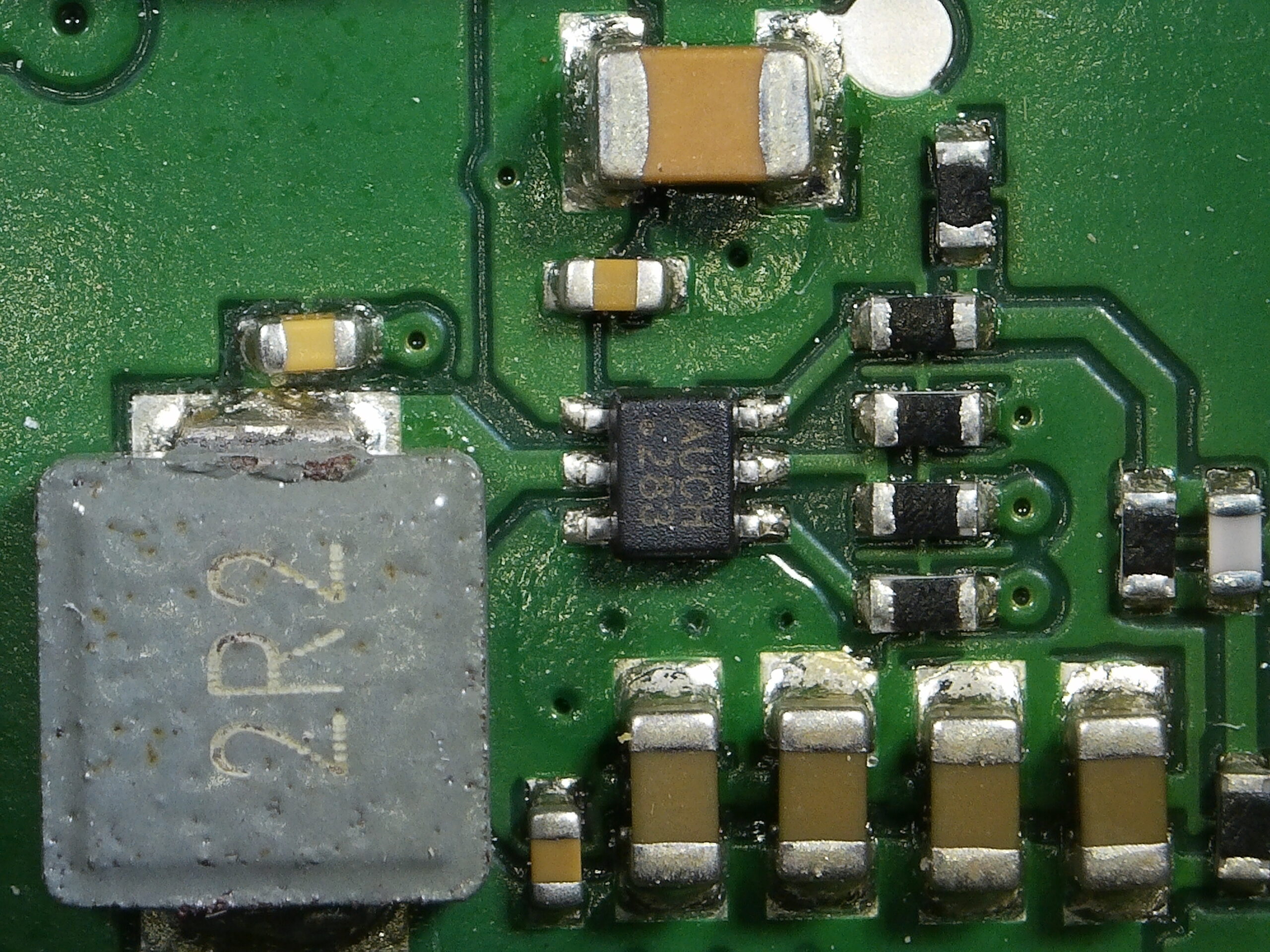
Ob meine alte Box wirklich mit genau dem beschriebenen Problem ausgefallen ist, wollte ich dennoch herausfinden. Die Sichtprüfung war noch immer gut, aber es war keine Spannung mehr zu messen. Daher habe ich mir von Aliexpress ein paar MP1477 (die genaue Bezeichnung ist MP1477GTF-Z) zuschicken lassen. Ich habe direkt alle drei verbauten Chips ausgetauscht und siehe da, die Box lebt wieder. Oft sollen dabei wohl noch die RF FRONT ENDs 055F als Folge der zu hohen Spannung sterben, aber diese haben es bei mir zum Glück überlebt.
Nun habe ich also auch noch ein Backup für das zukünftige Backup. Super…
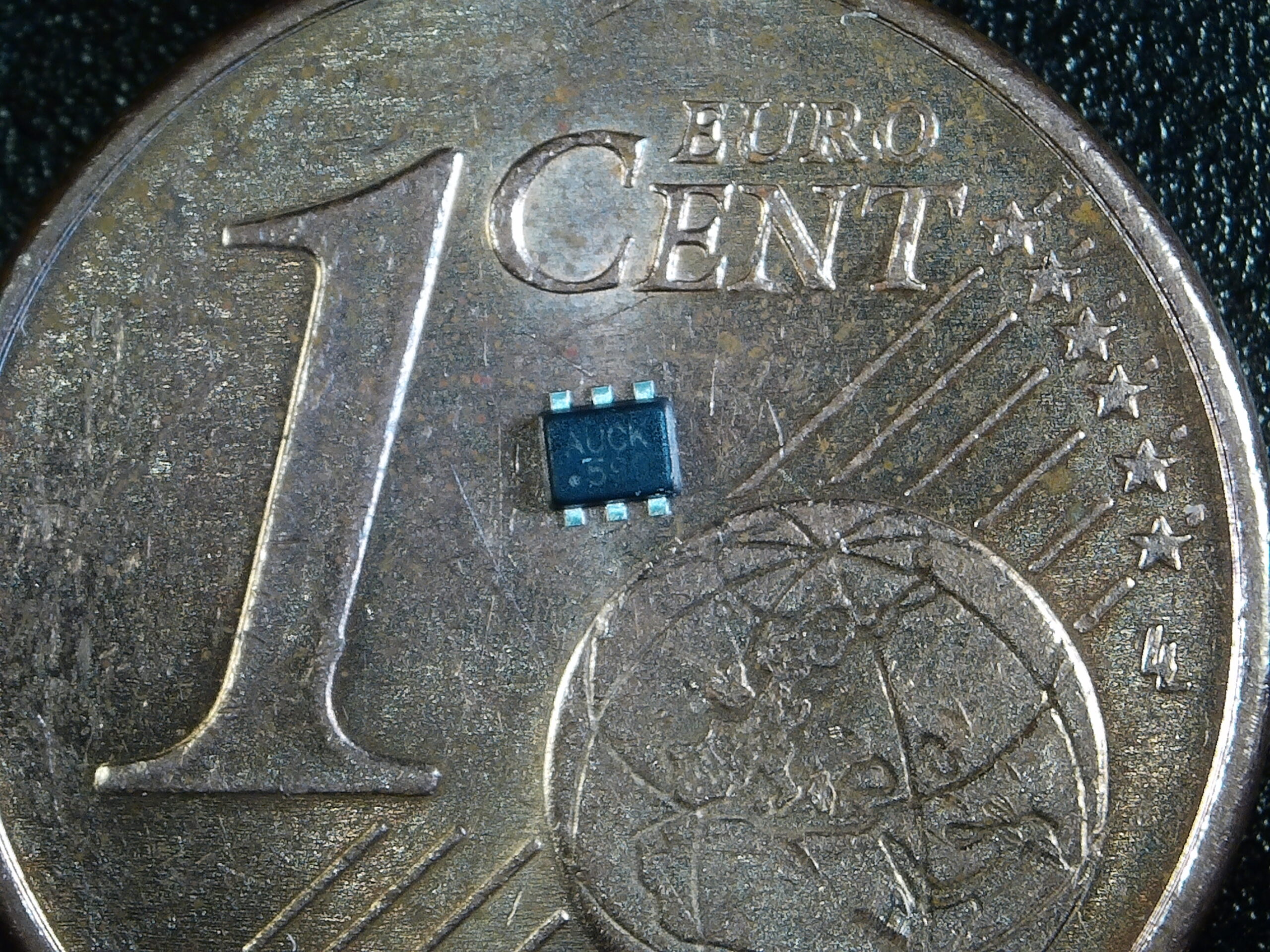
Da ich bei Aliexpress insgesamt 10 Stück bestellt habe, liegen hier jetzt noch ein paar herum. Ich wäre bereit, sie gegen ein Snickers zu tauschen, falls jemand von euch vor einem ähnlichen Problem steht. Uhh, und bedenkt bitte, dass die Dinger ECHT klein sind. Ich habe euch mal einen auf ein 1-Cent-Stück gelegt. Ohne Heißluftstation und etwas SMD-Löterfahrung solltet ihr das vielleicht lieber nicht angehen.
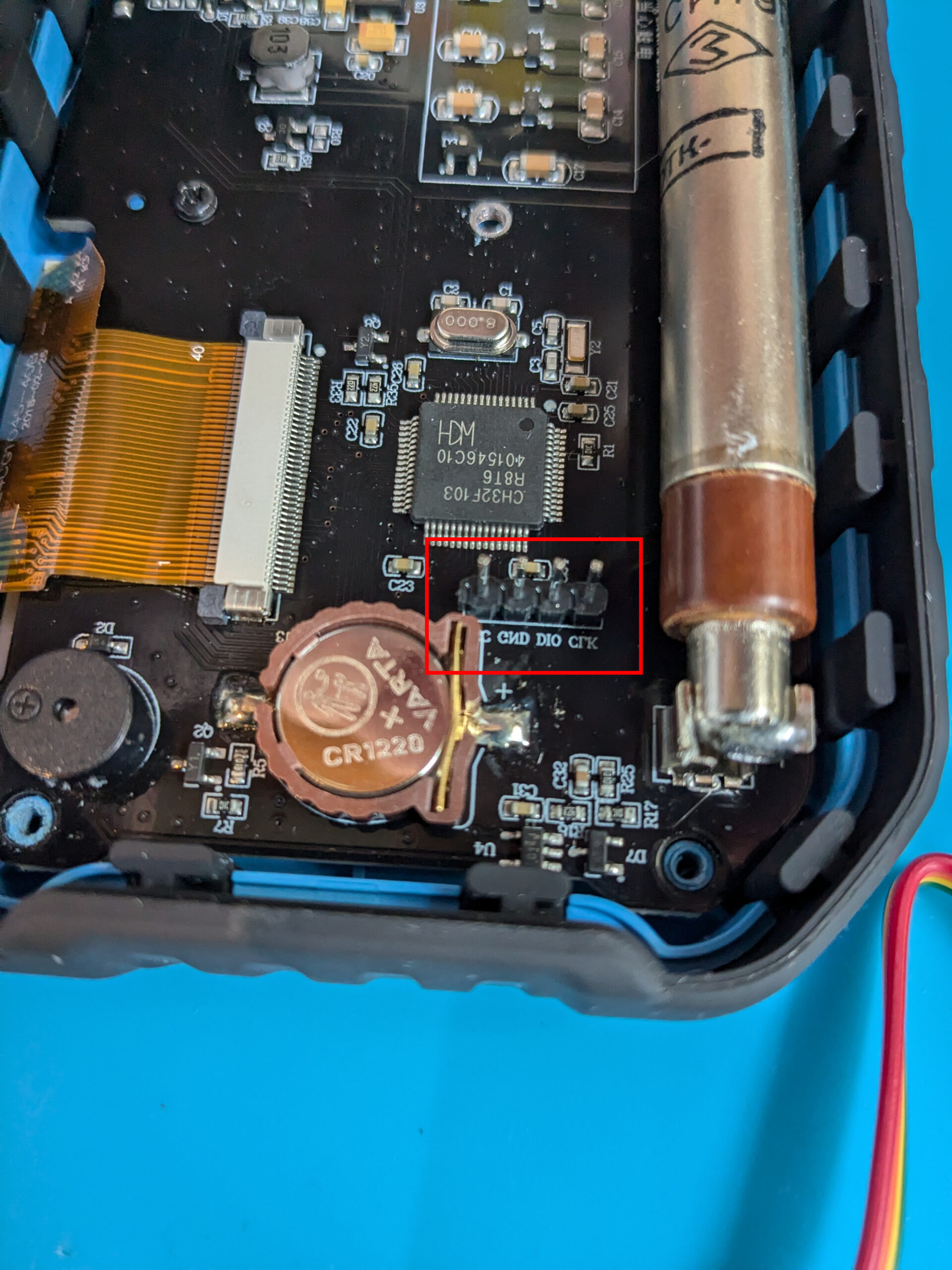
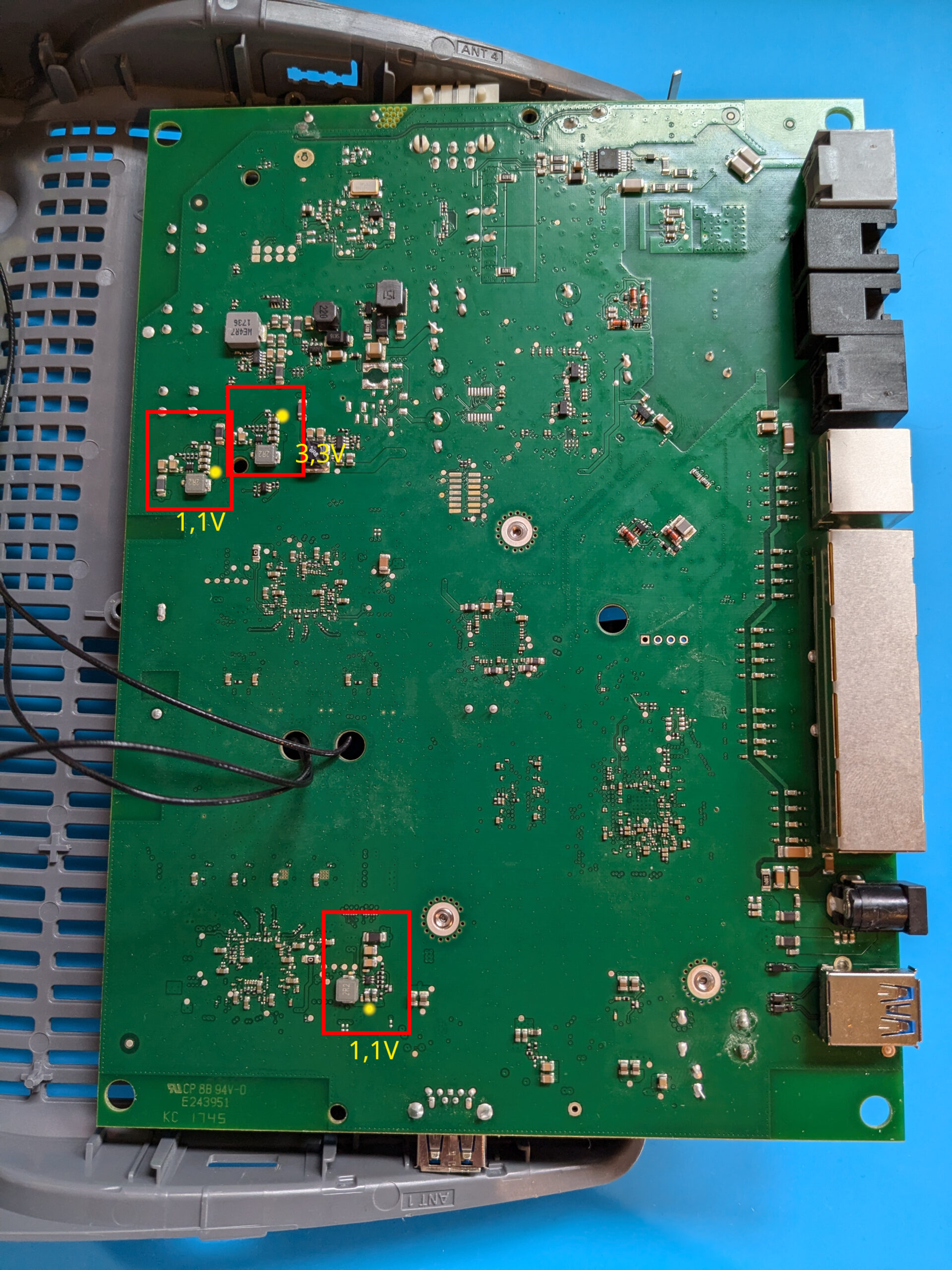
Die Messpunkte und die erwarteten Spannungen findet ihr im folgenden Bildchen.
Wenn ihr dann noch Fragen habt, fragt einfach 🙂